2WD ROSduino
Abstract
In this project, I used a couple of standard electronic parts to build an arduino car. It is either remote controlled by a xbox controller or autonomous with a sonic sensor. The challenge here was to figure out the electric circuit, a feasable ROS communication structure and implementing it all with C++. The final result can be seen here.

Background story
In winter 2019/2020 I won a robotics challenge at TU Darmstadt. In short, it is about autonomous pick-and-place of tennisballs with a Turtlebot3 and an additional gripper arm with 5 degrees of freedom.

You can have a look at the finals in YouTube. The price was an arduino powered 2wd car set (Assembly).
- after finished, I wanted it to be remote controlled
- bought raspberry pi 4B to make it remote controlled
- overkill, to make it autonomous, and not enough engin power
- lead to my recent project
Assembly
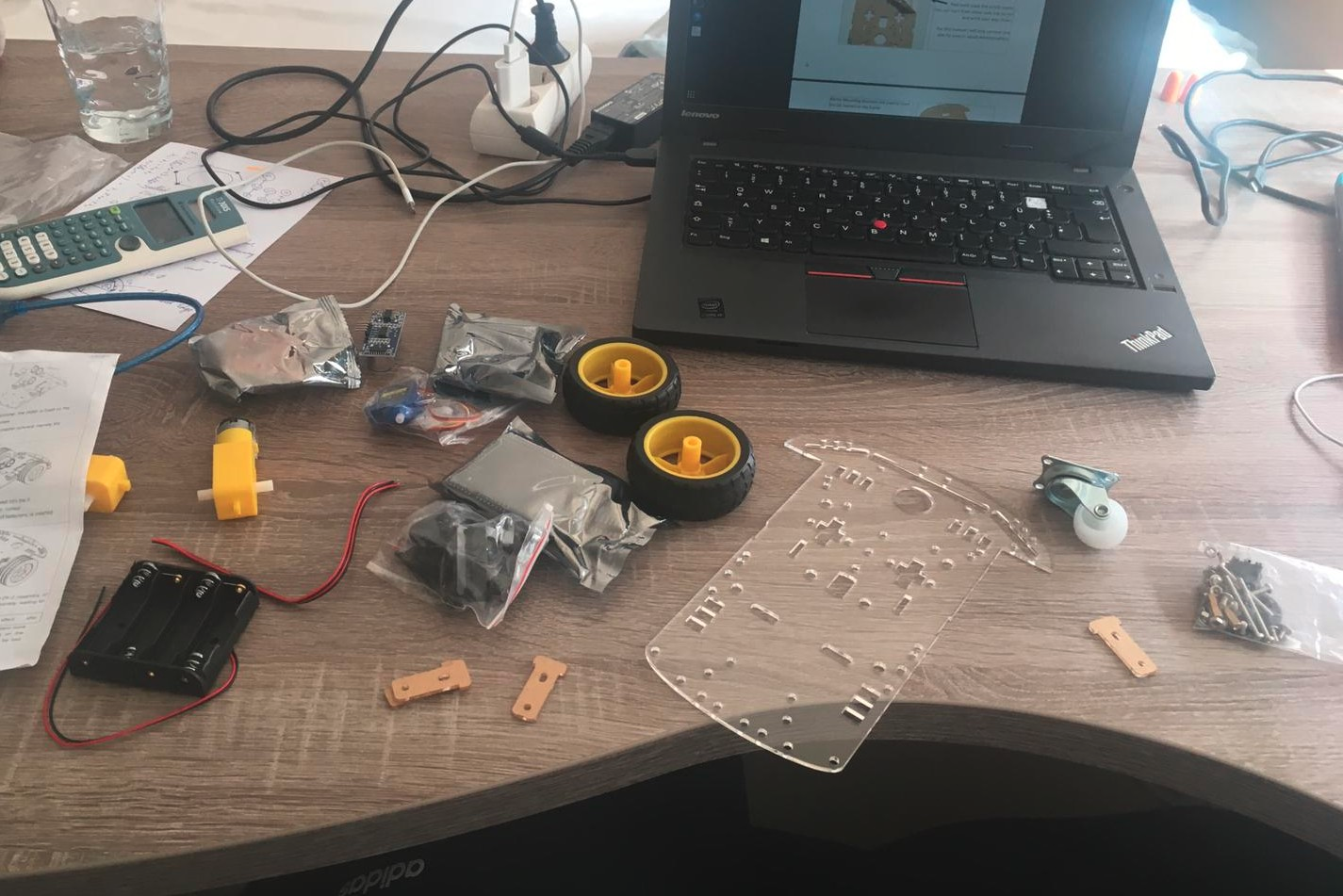
- show source and some parts and explain in short
Controller to Arduino communication
- explain communication between controller - laptop, laptop - raspberry pi, raspberry pi - Arduino